# Copyright (c) Meta Platforms, Inc. and affiliates. All rights reserved.
This tutorial showcases the cameras, transforms and so3 API.
The problem we deal with is defined as follows:
Given an optical system of $N$ cameras with extrinsics $\{g_1, ..., g_N | g_i \in SE(3)\}$, and a set of relative camera positions $\{g_{ij} | g_{ij}\in SE(3)\}$ that map between coordinate frames of randomly selected pairs of cameras $(i, j)$, we search for the absolute extrinsic parameters $\{g_1, ..., g_N\}$ that are consistent with the relative camera motions.
More formally: $$ g_1, ..., g_N = {\arg \min}_{g_1, ..., g_N} \sum_{g_{ij}} d(g_{ij}, g_i^{-1} g_j), $$, where $d(g_i, g_j)$ is a suitable metric that compares the extrinsics of cameras $g_i$ and $g_j$.
Visually, the problem can be described as follows. The picture below depicts the situation at the beginning of our optimization. The ground truth cameras are plotted in purple while the randomly initialized estimated cameras are plotted in orange:

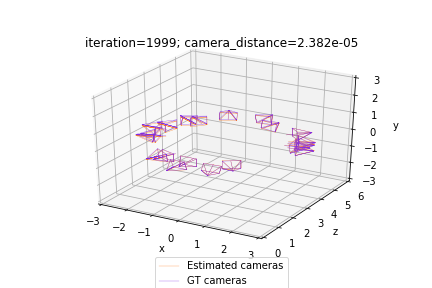
Our optimization seeks to align the estimated (orange) cameras with the ground truth (purple) cameras, by minimizing the discrepancies between pairs of relative cameras. Thus, the solution to the problem should look as follows:
In practice, the camera extrinsics $g_{ij}$ and $g_i$ are represented using objects from the SfMPerspectiveCameras class initialized with the corresponding rotation and translation matrices R_absolute and T_absolute that define the extrinsic parameters $g = (R, T); R \in SO(3); T \in \mathbb{R}^3$. In order to ensure that R_absolute is a valid rotation matrix, we represent it using an exponential map (implemented with so3_exp_map) of the axis-angle representation of the rotation log_R_absolute.
Note that the solution to this problem could only be recovered up to an unknown global rigid transformation $g_{glob} \in SE(3)$. Thus, for simplicity, we assume knowledge of the absolute extrinsics of the first camera $g_0$. We set $g_0$ as a trivial camera $g_0 = (I, \vec{0})$.
Ensure torch and torchvision are installed. If pytorch3d is not installed, install it using the following cell:
import os
import sys
import torch
need_pytorch3d=False
try:
import pytorch3d
except ModuleNotFoundError:
need_pytorch3d=True
if need_pytorch3d:
if torch.__version__.startswith("2.2.") and sys.platform.startswith("linux"):
# We try to install PyTorch3D via a released wheel.
pyt_version_str=torch.__version__.split("+")[0].replace(".", "")
version_str="".join([
f"py3{sys.version_info.minor}_cu",
torch.version.cuda.replace(".",""),
f"_pyt{pyt_version_str}"
])
!pip install fvcore iopath
!pip install --no-index --no-cache-dir pytorch3d -f https://dl.fbaipublicfiles.com/pytorch3d/packaging/wheels/{version_str}/download.html
else:
# We try to install PyTorch3D from source.
!pip install 'git+https://github.com/facebookresearch/pytorch3d.git@stable'
# imports
import torch
from pytorch3d.transforms.so3 import (
so3_exp_map,
so3_relative_angle,
)
from pytorch3d.renderer.cameras import (
SfMPerspectiveCameras,
)
# add path for demo utils
import sys
import os
sys.path.append(os.path.abspath(''))
# set for reproducibility
torch.manual_seed(42)
if torch.cuda.is_available():
device = torch.device("cuda:0")
else:
device = torch.device("cpu")
print("WARNING: CPU only, this will be slow!")
If using Google Colab, fetch the utils file for plotting the camera scene, and the ground truth camera positions:
!wget https://raw.githubusercontent.com/facebookresearch/pytorch3d/main/docs/tutorials/utils/camera_visualization.py
from camera_visualization import plot_camera_scene
!mkdir data
!wget -P data https://raw.githubusercontent.com/facebookresearch/pytorch3d/main/docs/tutorials/data/camera_graph.pth
OR if running locally uncomment and run the following cell:
# from utils import plot_camera_scene
# load the SE3 graph of relative/absolute camera positions
camera_graph_file = './data/camera_graph.pth'
(R_absolute_gt, T_absolute_gt), \
(R_relative, T_relative), \
relative_edges = \
torch.load(camera_graph_file)
# create the relative cameras
cameras_relative = SfMPerspectiveCameras(
R = R_relative.to(device),
T = T_relative.to(device),
device = device,
)
# create the absolute ground truth cameras
cameras_absolute_gt = SfMPerspectiveCameras(
R = R_absolute_gt.to(device),
T = T_absolute_gt.to(device),
device = device,
)
# the number of absolute camera positions
N = R_absolute_gt.shape[0]
We now define two functions crucial for the optimization.
calc_camera_distance compares a pair of cameras. This function is important as it defines the loss that we are minimizing. The method utilizes the so3_relative_angle function from the SO3 API.
get_relative_camera computes the parameters of a relative camera that maps between a pair of absolute cameras. Here we utilize the compose and inverse class methods from the PyTorch3D Transforms API.
def calc_camera_distance(cam_1, cam_2):
"""
Calculates the divergence of a batch of pairs of cameras cam_1, cam_2.
The distance is composed of the cosine of the relative angle between
the rotation components of the camera extrinsics and the l2 distance
between the translation vectors.
"""
# rotation distance
R_distance = (1.-so3_relative_angle(cam_1.R, cam_2.R, cos_angle=True)).mean()
# translation distance
T_distance = ((cam_1.T - cam_2.T)**2).sum(1).mean()
# the final distance is the sum
return R_distance + T_distance
def get_relative_camera(cams, edges):
"""
For each pair of indices (i,j) in "edges" generate a camera
that maps from the coordinates of the camera cams[i] to
the coordinates of the camera cams[j]
"""
# first generate the world-to-view Transform3d objects of each
# camera pair (i, j) according to the edges argument
trans_i, trans_j = [
SfMPerspectiveCameras(
R = cams.R[edges[:, i]],
T = cams.T[edges[:, i]],
device = device,
).get_world_to_view_transform()
for i in (0, 1)
]
# compose the relative transformation as g_i^{-1} g_j
trans_rel = trans_i.inverse().compose(trans_j)
# generate a camera from the relative transform
matrix_rel = trans_rel.get_matrix()
cams_relative = SfMPerspectiveCameras(
R = matrix_rel[:, :3, :3],
T = matrix_rel[:, 3, :3],
device = device,
)
return cams_relative
Finally, we start the optimization of the absolute cameras.
We use SGD with momentum and optimize over log_R_absolute and T_absolute.
As mentioned earlier, log_R_absolute is the axis angle representation of the rotation part of our absolute cameras. We can obtain the 3x3 rotation matrix R_absolute that corresponds to log_R_absolute with:
R_absolute = so3_exp_map(log_R_absolute)
# initialize the absolute log-rotations/translations with random entries
log_R_absolute_init = torch.randn(N, 3, dtype=torch.float32, device=device)
T_absolute_init = torch.randn(N, 3, dtype=torch.float32, device=device)
# furthermore, we know that the first camera is a trivial one
# (see the description above)
log_R_absolute_init[0, :] = 0.
T_absolute_init[0, :] = 0.
# instantiate a copy of the initialization of log_R / T
log_R_absolute = log_R_absolute_init.clone().detach()
log_R_absolute.requires_grad = True
T_absolute = T_absolute_init.clone().detach()
T_absolute.requires_grad = True
# the mask the specifies which cameras are going to be optimized
# (since we know the first camera is already correct,
# we only optimize over the 2nd-to-last cameras)
camera_mask = torch.ones(N, 1, dtype=torch.float32, device=device)
camera_mask[0] = 0.
# init the optimizer
optimizer = torch.optim.SGD([log_R_absolute, T_absolute], lr=.1, momentum=0.9)
# run the optimization
n_iter = 2000 # fix the number of iterations
for it in range(n_iter):
# re-init the optimizer gradients
optimizer.zero_grad()
# compute the absolute camera rotations as
# an exponential map of the logarithms (=axis-angles)
# of the absolute rotations
R_absolute = so3_exp_map(log_R_absolute * camera_mask)
# get the current absolute cameras
cameras_absolute = SfMPerspectiveCameras(
R = R_absolute,
T = T_absolute * camera_mask,
device = device,
)
# compute the relative cameras as a composition of the absolute cameras
cameras_relative_composed = \
get_relative_camera(cameras_absolute, relative_edges)
# compare the composed cameras with the ground truth relative cameras
# camera_distance corresponds to $d$ from the description
camera_distance = \
calc_camera_distance(cameras_relative_composed, cameras_relative)
# our loss function is the camera_distance
camera_distance.backward()
# apply the gradients
optimizer.step()
# plot and print status message
if it % 200==0 or it==n_iter-1:
status = 'iteration=%3d; camera_distance=%1.3e' % (it, camera_distance)
plot_camera_scene(cameras_absolute, cameras_absolute_gt, status)
print('Optimization finished.')
In this tutorial we learnt how to initialize a batch of SfM Cameras, set up loss functions for bundle adjustment, and run an optimization loop.